
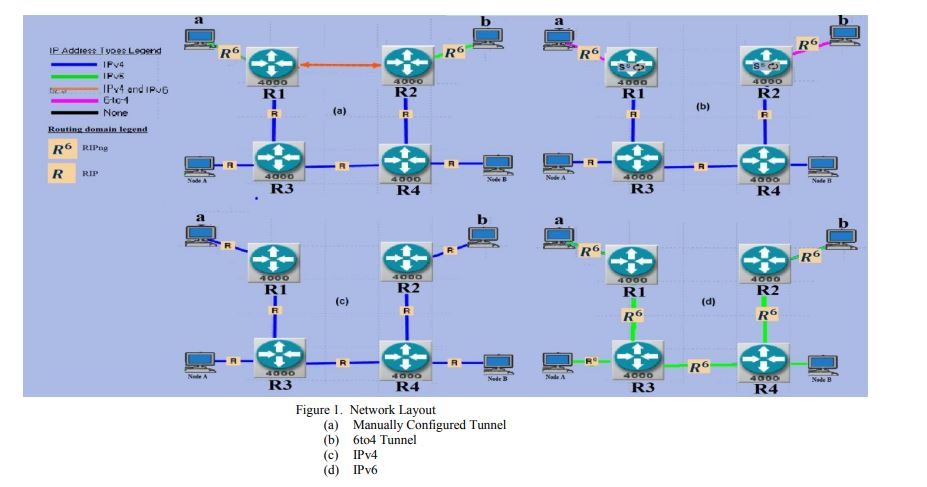
Convergence study of IPv6 tunneling techniques
IPv4 address exhaustion pushed IETF to create IPv6, the improved substitute of IPv4. The Internet complexity and its enormous size prolong the transition from IPv4 to IPv6 process. This means that both versions will necessarily co-exist. Meanwhile, tunneling appears as a solution trend. The tunneling is a transition technique that is considered temporary till all ISPs would support IPv6. At this paper, we compare the routing convergence of two tunnel types, 6to4 and Manually Configured versus the conventional IPv4 and IPv6 protocols. We analyze the network resources consumed during cold start
ITS navigation and live timetables for the blind based on RFID robotic localization algorithms and ZigBee broadcasting
This paper tries to alleviate some challenges facing blind and visually impaired people in public transportation systems by providing them with in-station navigation information and real-time schedule information. Novel system architecture for the Intelligent Transportation Systems (ITS) navigation for blind and visually impaired people based on recent Radio Frequency Identification (RFID) localization technologies, commonly used in robotics, is proposed. Furthermore, a live timetable using a new ZigBee network broadcasting protocol with detailed frame structure is used for provision of real
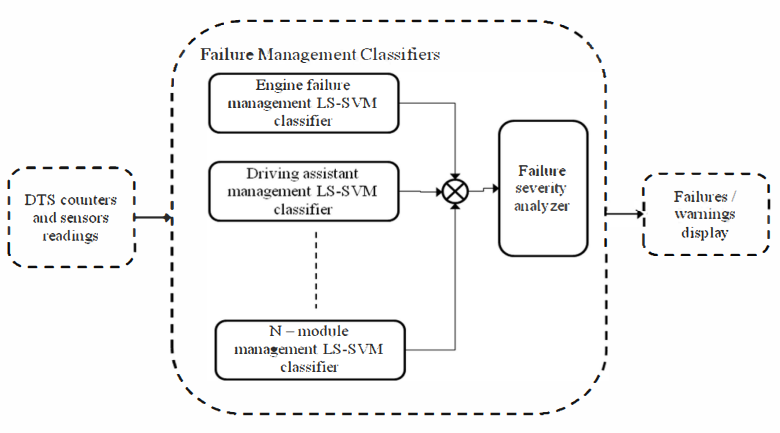
Remote prognosis, diagnosis and maintenance for automotive architecture based on least squares support vector machine and multiple classifiers
Software issues related to automotive controls account for an increasingly large percentage of the overall vehicles recalled. To alleviate this problem, vehicle diagnosis and maintenance systems are increasingly being performed remotely, that is while the vehicle is being driven without need for factory recall and there is strong consumer interest in Remote Diagnosis and Maintenance (RD&M) systems. Such systems are developed with different building blocks/elements and various capabilities. This paper presents a novel automotive RD&M system and prognosis architecture. The elements of the
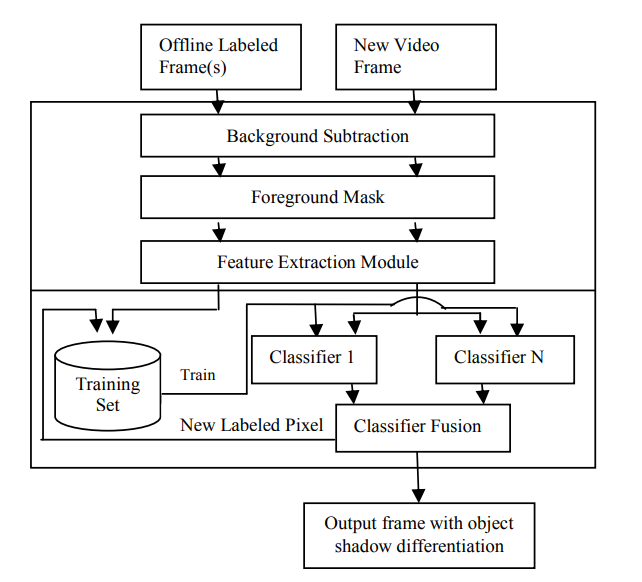
A semi supervised learning-based method for adaptive shadow detection
In vision-based systems, cast shadow detection is one of the key problems that must be alleviated in order to achieve robust segmentation of moving objects. Most methods for shadow detection require significant human input and they work in static settings. This paper proposes a novel approach for adaptive shadow detection by using semi-supervised learning which is a technique that has been widely utilized in various pattern recognition applications and exploits the use of labeled and unlabeled data to improve classification. The approach can be summarized as follows: First, we extract color
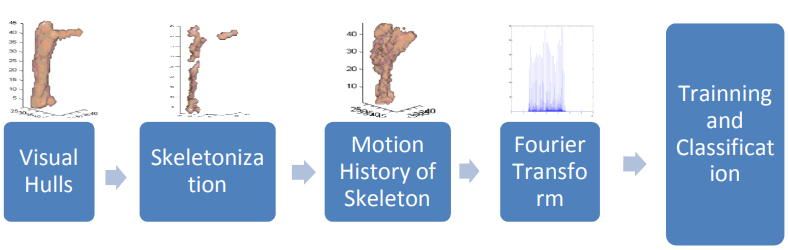
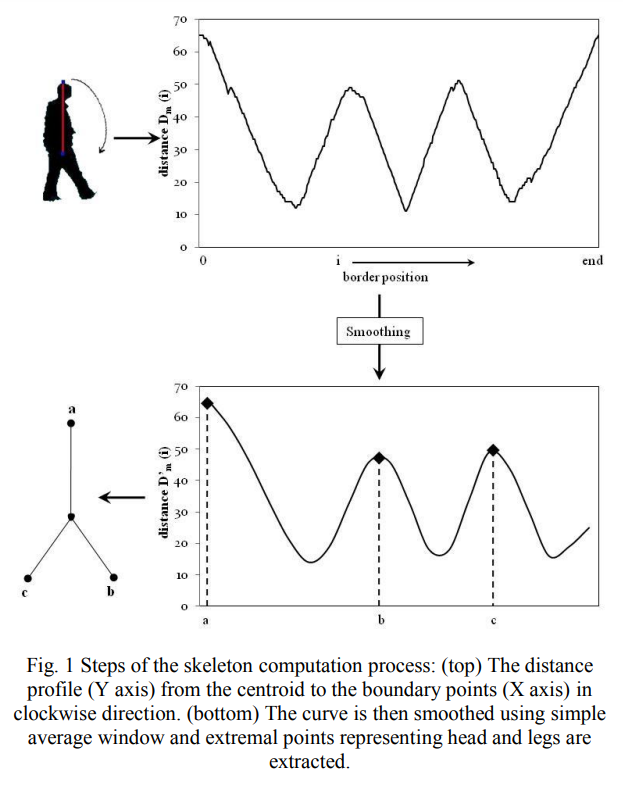
Motion history of skeletal volumes for human action recognition
Human action recognition is an important area of research in computer vision. Its applications include surveillance systems, patient monitoring, human-computer interaction, just to name a few. Numerous techniques have been developed to solve this problem in 2D and 3D spaces. However most of the existing techniques are view-dependent. In this paper we propose a novel view-independent action recognition algorithm based on the motion history of skeletons in 3D. First, we compute a skeleton for each volume and a motion history for each action. Then, alignment is performed using cylindrical
Convolutional Neural Network-Based Deep Urban Signatures with Application to Drone Localization
Most commercial Small Unmanned Aerial Vehicles (SUAVs) rely solely on Global Navigation Satellite Systems (GNSSs) - such as GPS and GLONASS - to perform localization tasks during the execution of autonomous navigation activities. Despite being fast and accurate, satellite-based navigation systems have typical vulnerabilities and pitfalls in urban settings that may prevent successful drone localization. This paper presents the novel concept of 'Deep Urban Signatures' where a deep convolutional neural network is used to compute a unique characterization for each urban area or district based on
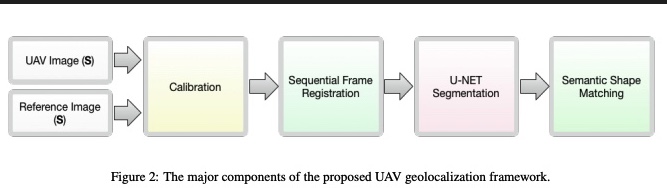
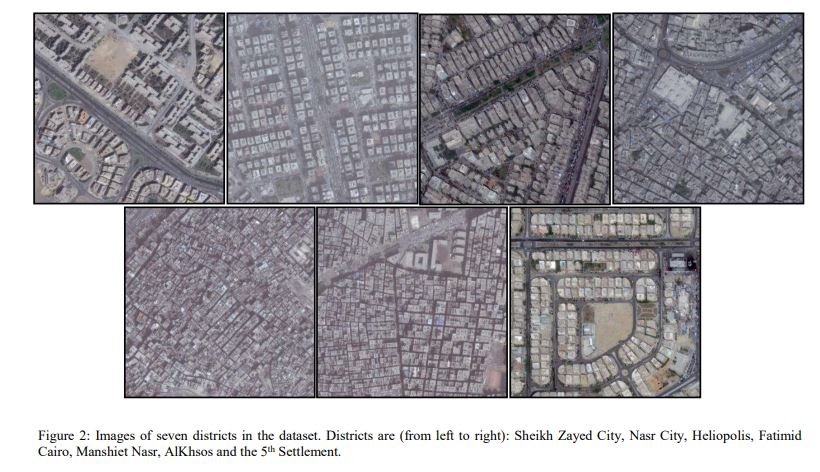
A deep CNN-based framework for enhanced aerial imagery registration with applications to UAV geolocalization
In this paper we present a novel framework for geolocalizing Unmanned Aerial Vehicles (UAVs) using only their onboard camera. The framework exploits the abundance of satellite imagery, along with established computer vision and deep learning methods, to locate the UAV in a satellite imagery map. It utilizes the contextual information extracted from the scene to attain increased geolocalization accuracy and enable navigation without the use of a Global Positioning System (GPS), which is advantageous in GPS-denied environments and provides additional enhancement to existing GPS-based systems
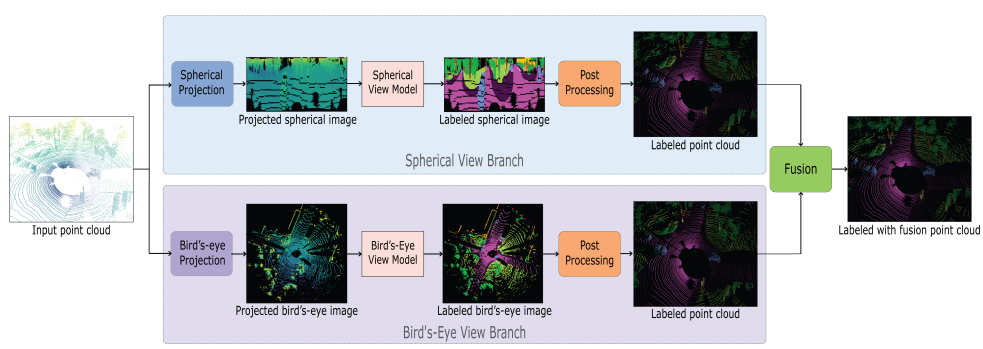
Multi projection fusion for real-time semantic segmentation of 3D LiDAR point clouds
Semantic segmentation of 3D point cloud data is essential for enhanced high-level perception in autonomous platforms. Furthermore, given the increasing deployment of LiDAR sensors onboard of cars and drones, a special emphasis is also placed on non-computationally intensive algorithms that operate on mobile GPUs. Previous efficient state-of-the-art methods relied on 2D spherical projection of point clouds as input for 2D fully convolutional neural networks to balance the accuracy-speed trade-off. This paper introduces a novel approach for 3D point cloud semantic segmentation that exploits
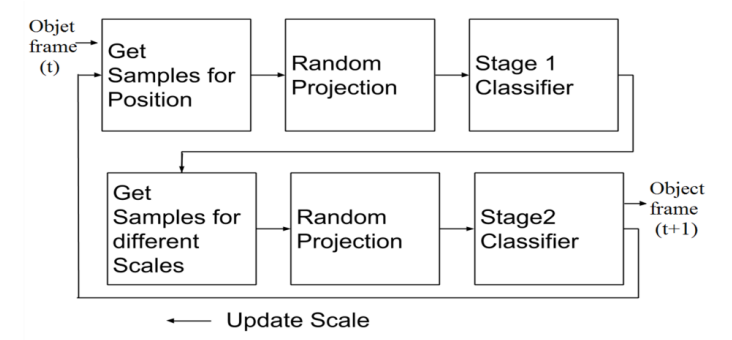
Real-time scale-adaptive compressive tracking using two classification stages
In this paper, we describe a method for Scale-Adaptive visual tracking using compressive sensing. Instead of using scale-invariant-features to estimate the object size every few frames, we use the compressed features at different scale then perform a second stage of classification to detect the best-fit scale. We describe the proposed mechanism of how we implement the Bayesian Classifier used in the algorithm and how to tune the classifier to address the scaling problem and the method of selecting the positive training samples and negative training samples of different scales. The obtained
Change analysis for gait impairment quantification in smart environments
Visual Sensor Networks (VSNs) open up a new realm of smart autonomous applications based on enhanced three- dimensional sensing and collaborative reasoning. An emerging VSN application domain is pervasive healthcare delivery where gait information computed from distributed vision nodes is used for observing the wellbeing of the elderly, quantifying post-operative patient recovery and monitoring the progression of neurodegenerative diseases such as Parkinson's. The development of patient-specific gait analysis models, however, is challenging since it is unfeasible to obtain normal and impaired