
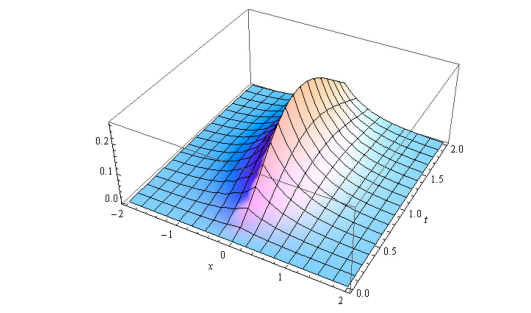
Two-dimensional heat conduction in a rigid thermal conductor within the dual-phase-lag model by one-sided Fourier transform
An exact analytical solution in closed form is obtained for a two-dimensional initial-boundary-value problem of heat wave propagation in a thick slab of an anisotropic rigid thermal conductor within the dual-phase-lag model. One-sided Fourier transform technique is used to obtain a formal solution. The method requires an essential change of the dependent variable in order to guarantee a suitable asymptotic time behavior of the unknown function. The solution satisfies prescribed boundary temperatures and zero initial conditions. Numerical results are presented to put in evidence the effect of
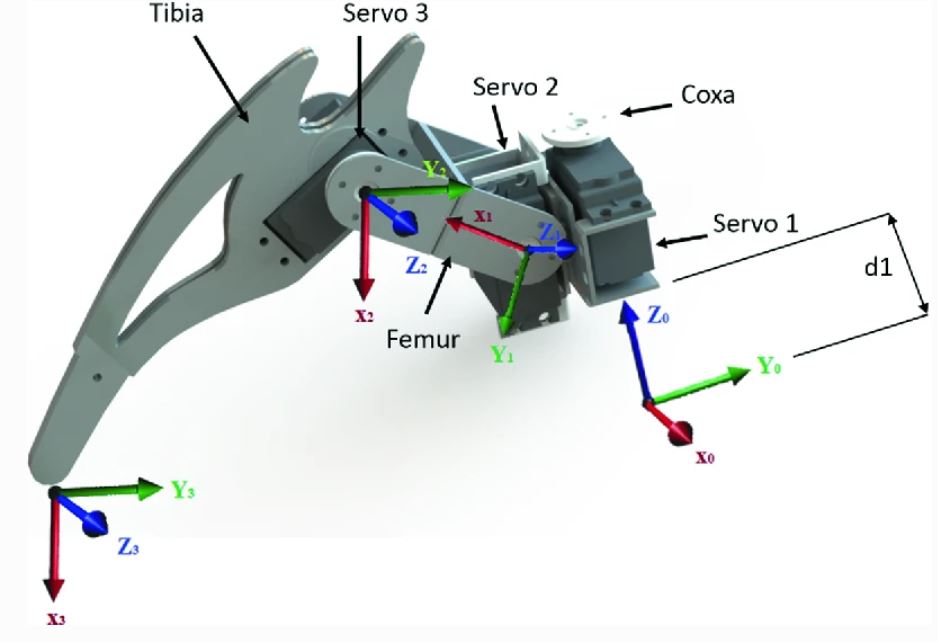
Experimental Modeling of Hexapod Robot Using Artificial Intelligence
Hexapod Robots gave us the opportunity to study walking robots without facing problems such as stability and expensive custom made hardware. It has a great deal of flexibility in moving over different terrains even if some legs become malfunctioned or facing some difficulties in movement. In this study the kinematic analysis of CH3-R 18DOF Hexapod Robot is discussed where each leg contains three revolute joints in order to mimic the structure of a spider. To develop the overall kinematic model of CH3-R robot, direct and inverse kinematic analyses for each leg have been considered where the
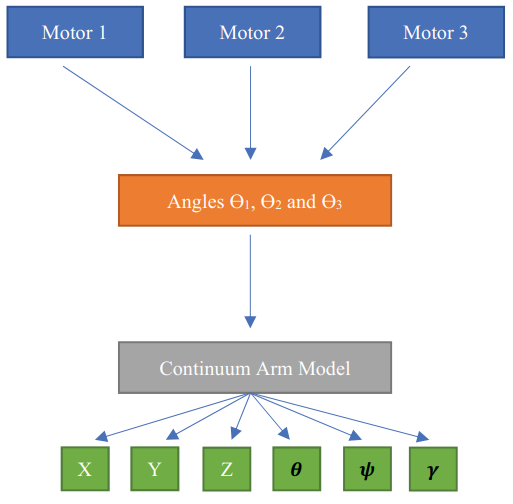
Modelling of Continuum Robotic Arm Using Artificial Neural Network (ANN)
Continuum robotic arm becomes the new area of scientific research nowadays. Its technology has grown and touched several vital applications included industry and agriculture thanks to many advantages made it a better choice than the conventional serial robotic manipulator. This paper represents a new designed model of continuum arm robot, which relates the motor shaft angle as the input parameter and transfers the motor torque to combined system of compression springs and results in six outputs: x,y and z 3D coordinates for the center point of the end effector and \theta,~\psi and \gamma to
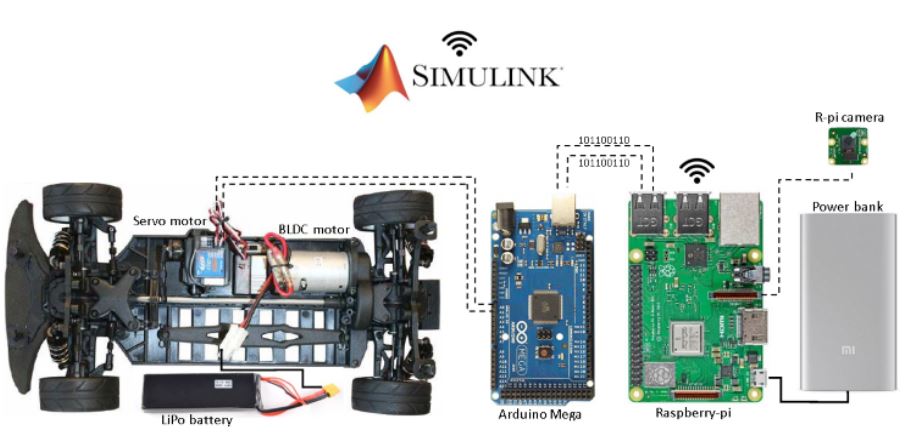
Experimental Lane Keeping Assist for an Autonomous Vehicle Based on Optimal PID Controller
Detection of the lane boundary is the primary task in order to control the trajectory of an autonomous car. In this paper, three methodologies for lane detection are discussed with experimental illustration: Blob analysis, Hough transformation and Birds eye view. The next task after receiving the boundary points is to apply a control law in order to trigger the steering and velocity control to the motors efficiently. In the following, a comparative analysis is made between different tuning criteria to tune PID controller for Lane Keeping Assist (LKA). In order to receive the information of the
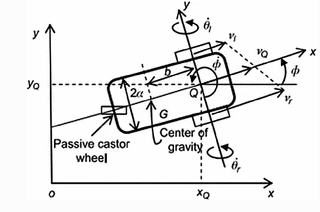
Experimental Path tracking optimization and control of a nonlinear skid steering tracked mobile robot
The skid steering tracked robot is consider one of the famous robots that used in the autonomous agricultural field. The robot model is considered as a coupled nonlinear model. So, a real kinematic model is required to develop the robot motion which will improve the high quality and quantity of the cultivated crops. So, in this research a mathematical model for the skid steering mobile robot (SSMR) and a mathamtical model has been presented to simulate the robot. The model has been validated based on experimental data for the Skid Steering model. The robot motion as position and velocity has
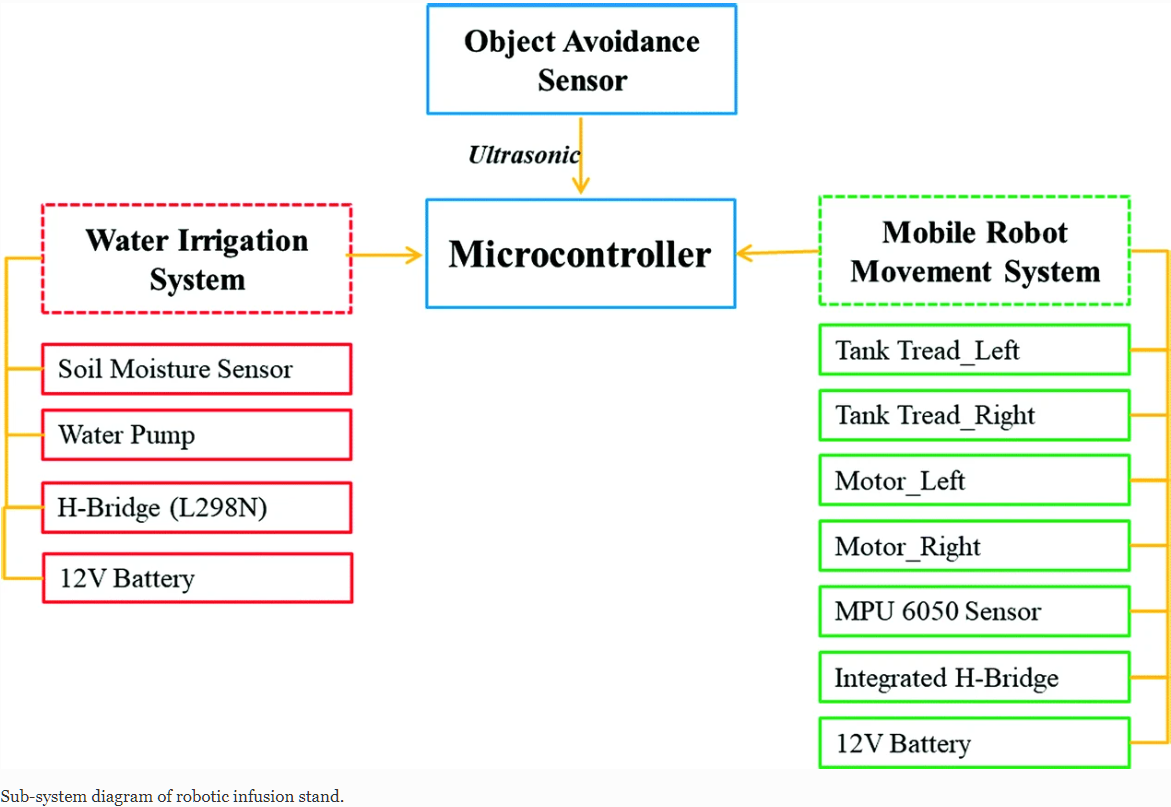
Two-Degree of Freedom Proportional Integral Derivative (2-DOF PID) Controller for Robotic Infusion Stand
Infusion Stand is one of the medical supportive tools in the field of biomedical that assist in holding and carrying medications to patients via intravenous injections. Mobilization of Infusion Stand from a place to another place is necessary not only for the patients itself but also for the nurses. Therefore, this leads to not only uneasiness but also inconvenience for both parties. Therefore, to improve the existing situation and current Infusion Stand in the market, a proposal to design and implement a prototypic Robotic Infusion Stand is submitted. In this paper, 2-Degree of Freedom
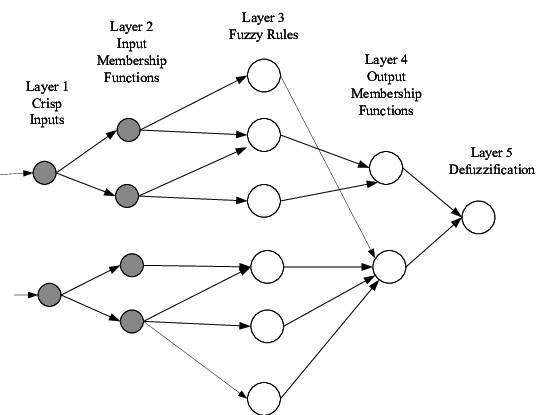
Neuro-fuzzy system for 3-dof parallel robot manipulator
Planar Parallel manipulators (PPMs) are widely used these days, as they have many advantages compared to their serial counterparts. However, their inverse and direct kinematics are hard to obtain, due to the complexity of the manipulators' behavior. Therefore, this paper provides a comparative analysis for two methods that were used to obtain the inverse kinematics of a 3-RRR manipulator. Instead of the conventional algebraic and graphical methods used for attaining the mathematical models for such manipulators, an adaptive neuro-fuzzy inference structure (AFNIS) model was alternatively
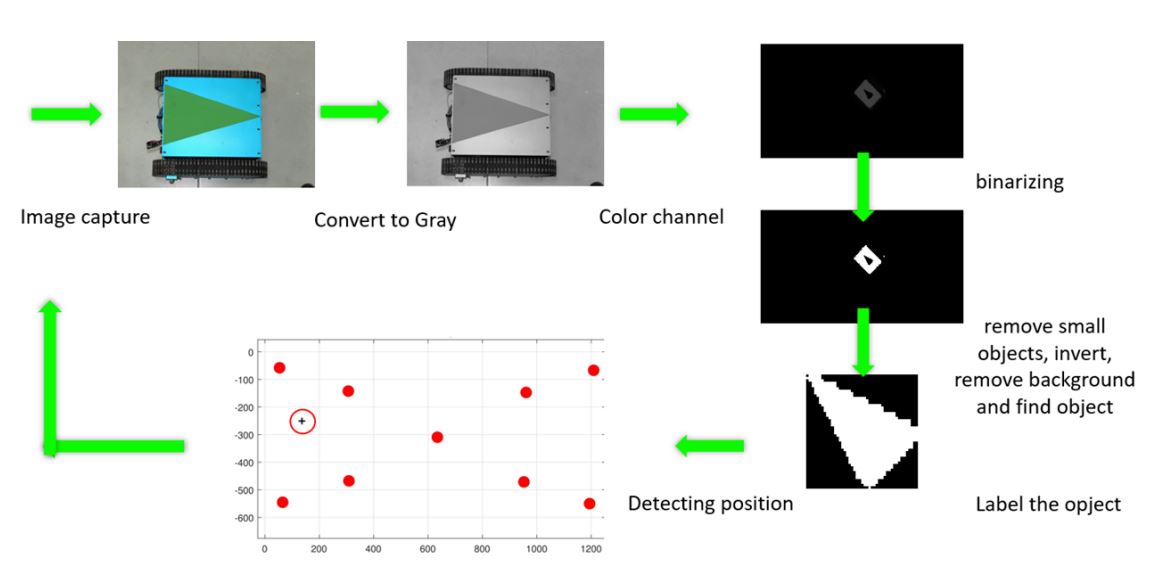
Optimal Proportional Integral Derivative (PID) Controller Design for Smart Irrigation Mobile Robot with Soil Moisture Sensor
Uncertainty on the condition of the weather always give a major headache to the agricultural industry as the cultivated plant that is grown on a large scale commercially rely on the condition of the weather. Therefore, to reduce the interdependency on the weather itself, a recommendation to develop a prototypic mobile robot for smart irrigation is submitted. Smart irrigation system is an essential tool from yield point of view and scarcity of the water. This smart irrigation system adopts a soil moisture sensor to measure the moisture content of the soil and automatically provide a signal to

Study of Approaches to Implement the Prism-Based Surface Plasmon Resonance Sensors
Surface plasmon resonance (SPR) sensors are increasingly in demand due to their high sensitivity, better accuracy, and improved detection limit. Such performance parameters make these sensors suitable for biological and medical field’s applications. During the last decade, prism coupling-based SPR sensors had been a preferred choice among the designer and developers across the globe. This article summarizes a review of prism coupling-based SPR photonic sensors. Important performance characteristics of such sensors have also been studied with respect to their detection accuracy, sensitivity
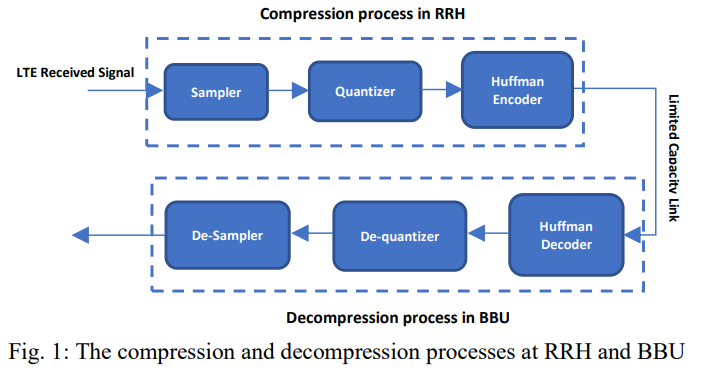
CPRI data compression using non-uniform quantized huffman technique in c-RAN
The long-term evolution (LTE) transports complex-baseband samples between the remote radio head and baseband processing unit. Common public radio interface (CPRI) protocol is used in practice and enables flexible radio head deployments and distributed antenna systems. Current wireless links (FSO and mmWave) have a few Gb/p transmissions which insufficient capacity are to support 20 MHz bandwidth LTE with multiple sectors. In this presented work, we propose a compression algorithm uses non-quantized Huffman. The proposed technique achieves 78% compression ratio while maintaining with EVM less